# 基本概念
# 组成部分与系统函数
- 正向通路系统函数:,描述从输入到输出的信号传输。
- 反馈通路系统函数:,描述从输出到反馈点的信号传输。
- 闭环系统函数:,描述整个反馈系统的输入-输出关系。
# 反馈的主要作用
# 降低系统灵敏度
反馈可以降低系统对正向通路增益变化的灵敏度。
当反馈量 远大于 1 时,灵敏度会显著降低。
# 逆系统设计
利用反馈原理,可以设计出近似等于其逆系统的系统,用于补偿。
当 足够大时,闭环系统的特性将近似于正向通路系统 的逆。
# 使不稳定系统稳定
通过反馈,可以将系统极点从右半平面(不稳定)移动到左半平面(稳定),从而稳定系统。
# 目标跟踪(锁相环,PLL)
锁相环是一种典型的反馈系统,用于使一个信号的相位与另一个信号的相位保持同步。
-
组成部分
- 鉴相器(Phase Detector, PD):比较输入信号与参考信号的相位差,并输出一个与相位差成比例的电压信号。
- 环路滤波器(Loop Filter, LF):对鉴相器输出的电压信号进行滤波,去除高频噪声,得到平滑的控制电压。
- 压控振荡器(Voltage-Controlled Oscillator, VCO):根据滤波后的控制电压产生一个输出信号,该信号的频率和相位与输入信号同步。
-
工作原理
- 鉴相器检测输入信号和反馈信号之间的相位差,产生误差信号。
- 误差信号通过环路滤波器,控制压控振荡器的输出频率和相位。
- VCO 输出的信号反馈到鉴相器,与输入信号进行比较,直到两者相位同步。
-
线性化的锁相环 S 域模型
- 闭环系统函数:
- 误差传递函数:
- 闭环系统函数:
-
环路阶数与跟踪性能
- 一阶环:。
- 误差传递函数:。
- 当输入仅存在初始相位差 时,一阶环可使稳态相位误差收敛为0。
- 二阶环:。
- 特征参数:
- 自然频率:
- 阻尼比:
- 误差传递函数:。
- 当输入存在初始恒定频率差 时,二阶环可使稳态相位误差收敛为0。
- 特征参数:
- 更高阶环:当输入信号的频率随时间变化(例如,频率斜变 )时,需要更高阶的环路才能实现稳态误差为0的跟踪。
- 一阶环:。
# 信号流图
# 术语定义
- 结点(Node):表示系统中变量或信号的点。所有输入到结点的信号叠加,并传递到所有输出支路。
- 支路(Branch):连接两个结点的定向线段。支路上的增益称为转移函数。
- 输入结点/源点(Input Node/Source):只有输出支路的结点,代表系统的自变量(输入信号)。
- 输出结点/阱点(Output Node/Sink):只有输入支路的结点,代表系统的因变量(输出信号)。
- 混合结点(Mixed Node):既有输入支路又有输出支路的结点。可通过增加一个单位传输的支路,将其转换为输出结点。
- 通路(Path):沿支路箭头方向通过各相连支路的途径。不允许有相反方向的支路。
- 开通路(Open Path):通路与任一结点相交不多于一次。
- 闭通路/环路(Closed Path/Loop):起点和终点相同的通路,且与任何其他结点相交不多于一次。
- 环路增益(Loop Gain):环路中各支路转移函数的乘积。
- 不接触环路(Non-touching Loops):两个环路之间没有任何公共结点。
- 前向通路(Forward Path):从输入结点到输出结点的通路,且通过任何结点不多于一次。
- 前向通路增益(Forward Path Gain):前向通路中各支路转移函数的乘积。
- 转置(Transposition):将流图中所有支路的传输方向调转,同时交换输入结点和输出结点,其转移函数保持不变。
# 流图的化简方法
# 图形化简
- 并联相加,串联相乘:遵循常规电路规则。
- 混合结点:将混合结点上的输入信号,通过该结点自身的增益,分别传递到所有输出支路,实现解耦。
- 消除环路:对于有自环的结点,将其所有输入支路增益乘以 来消除自环(由于流图均是加法,反馈公式分母为 )。
# 代数化简(梅森增益公式)
梅森增益公式(Mason's Gain Formula)用于计算从源点到阱点的总增益。
- :流图的特征行列式。
- :表示从源点到阱点的第 条前向通路。
- :表示第 条前向通路的增益。
- :对于第 条前向通路,是除去与该通路相接触的环路后,剩下部分的特征行列式。
# 利用梅森公式画出流图
-
原理
- 简化流图结构:如果流图中所有环路都互相接触,则 。
- 简化通路增益:如果流图中每一条前向通路都与所有环路接触,则 。
- 连续系统实现:连续系统通常用积分器 来实现。
-
系统函数对应流图示例
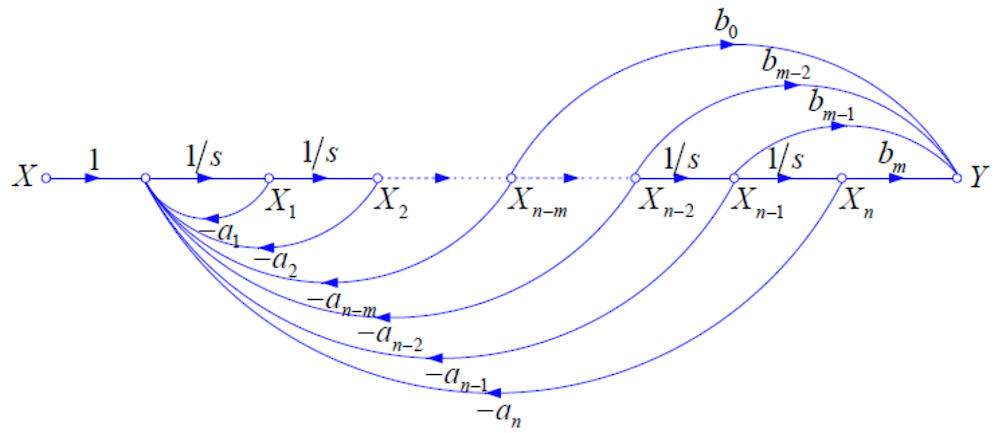
- 考虑一个通用系统函数:
- 该系统函数可以表示为一个信号流图,其中包含串联的积分器和反馈环路,如图所示: